Loop Detectors
A loop detector comprises a vehicle detector and inductive loops. The loops are buried underground and each of them corresponds to a lane. Therefore, the loop detector can detect traffic in various lanes, sense vehicles passing over the loop, and transmit the detection signal to the connected ITS camera, so that the camera can precisely detect the vehicles and their locations. This is also the primary purpose of using loop detectors in ITS solutions.
When multiple loops are buried in a scenario, the vehicle speed can be estimated based on the time for the vehicle to pass two loops and the distance between the two loops. The loop detector can also be used to detect the vehicle's location in passing vehicle capture, red-light-running detection, and wrong-way-driving detection. These are common applications of loop detectors.
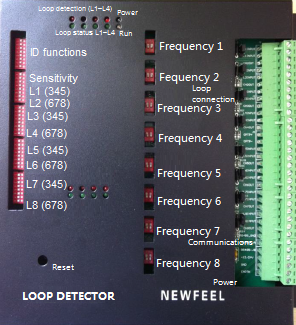
Common loop detectors are RS-485 loop detectors and I/O loop detectors. You can use the RS-485 loop detector of the PK600 or LD-220X model with ePolice cameras. Figure 1-8 and Figure 1-9 show the appearance of the two models of loop detectors. The I/O loop vehicle detector is similar to the RS-485 loop vehicle detector, but their interfaces and connection modes are different.

The economic and time costs for burying loops are high. In addition, the video analysis capability of ITS cameras becomes more and more powerful. When there is no loop detector, the camera can still detect the appearance, moving path, and status of vehicles through video image analysis (various detection lines are drawn on the video image). Therefore, fewer and fewer loop vehicle detectors are used in ITS solutions.